

IAR复合机器人
复合机器人拥有移动、抓取与搬运的集成作业能力,具备高精度、高柔性、高拓展性、易操作、人机协作等特点,可支持不同场景应用的快速集成落地,简化复杂的物料搬运场景,实现更高效的工业自动化。
分类:
分享
相关产品
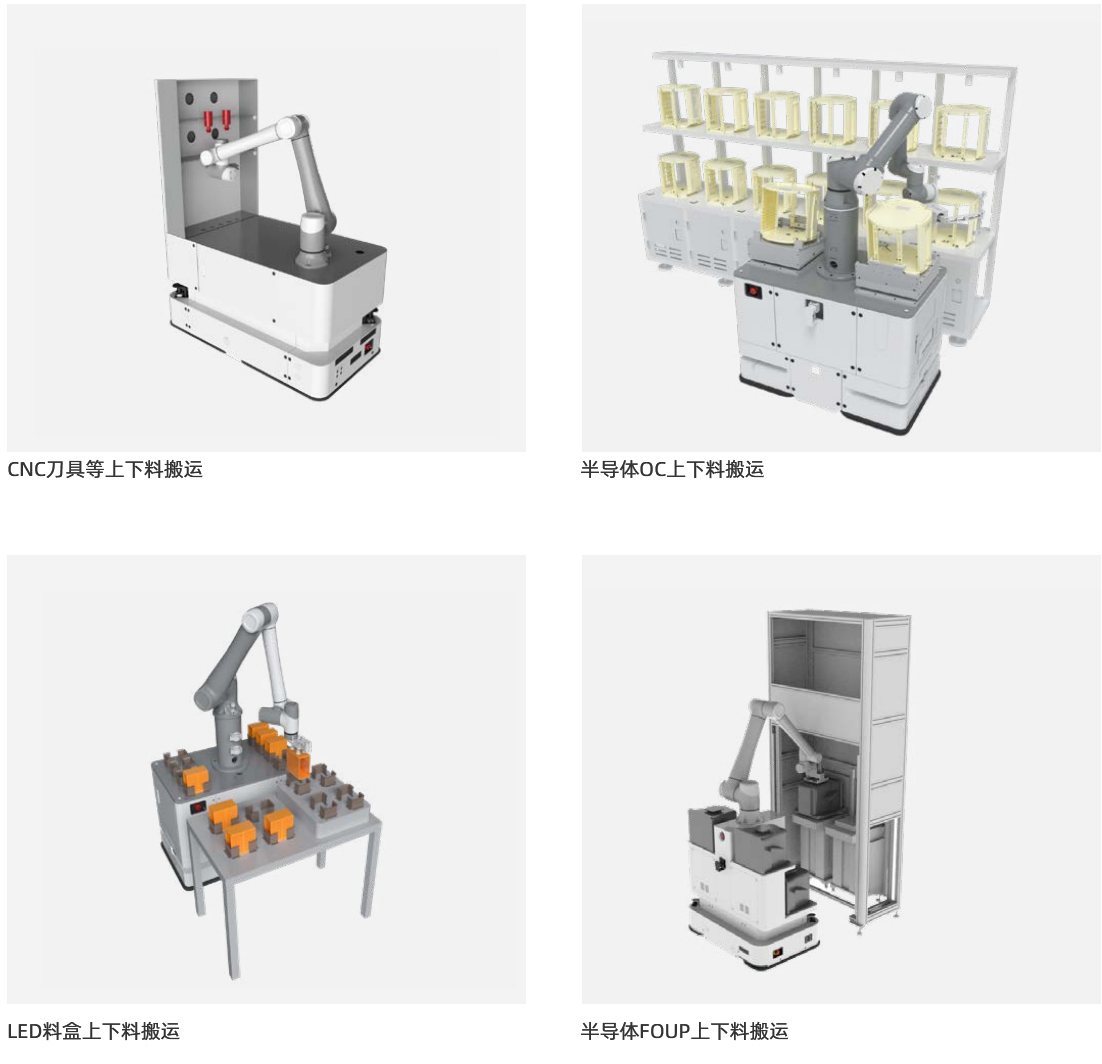
- 复合移动作业机器人搭配机械臂、视觉、夹爪等机构进行移动作业,实现晶圆盒,Foup,Cassette,Magazine,Tray盘等封测厂常用载具在不同工序设备之间的自动化转运和上下料。
- 使用Slam导航技术,无需标识物即可完成定位,保证机器人运行的柔性操作与现场美观度。
- 支持不同的作业环境,适应狭窄通道,联通输送线,电梯等自动化设备,可执行各种复杂任务。
- 车体配备360°全方位立体防护和检测,保障机器人运行安全可靠。



描述
功能特点
高性能
- 高可靠性:支持市场上主流协作臂集成,支持不同负载和臂展的协作臂的稳定运行
- 高精度:结合视觉识别,机械臂末端执行精度可达±1mm、±0.2°
- 操作空间大:底盘柔性移动,配合协作臂6轴自由度,可覆盖较大的操作空间,实现密集操作
拓展性
- 拓展接口丰富:底盘提供上层机构标准对接孔位、标准电气接口(电源、通信、IO),以及标准通信协议(ModbusRTU/TCP等)
- 场景拓展性:基于协作臂、视觉和夹爪等不同设计,可快速匹配不同场景的应用需求
高柔性
- 导航方式丰富:360°双激光、SLAM导航+惯性导航,视觉精确定位(二维码辅助),兼容纹理导航
- 柔性运动控制:差速或者全向驱动,支持前进、后退、转弯、旋转等运动控制,运动过程平滑柔顺
- 多重安全防护:多传感器感知融合、360°安全防护、支持柔性绕障等

应用场景
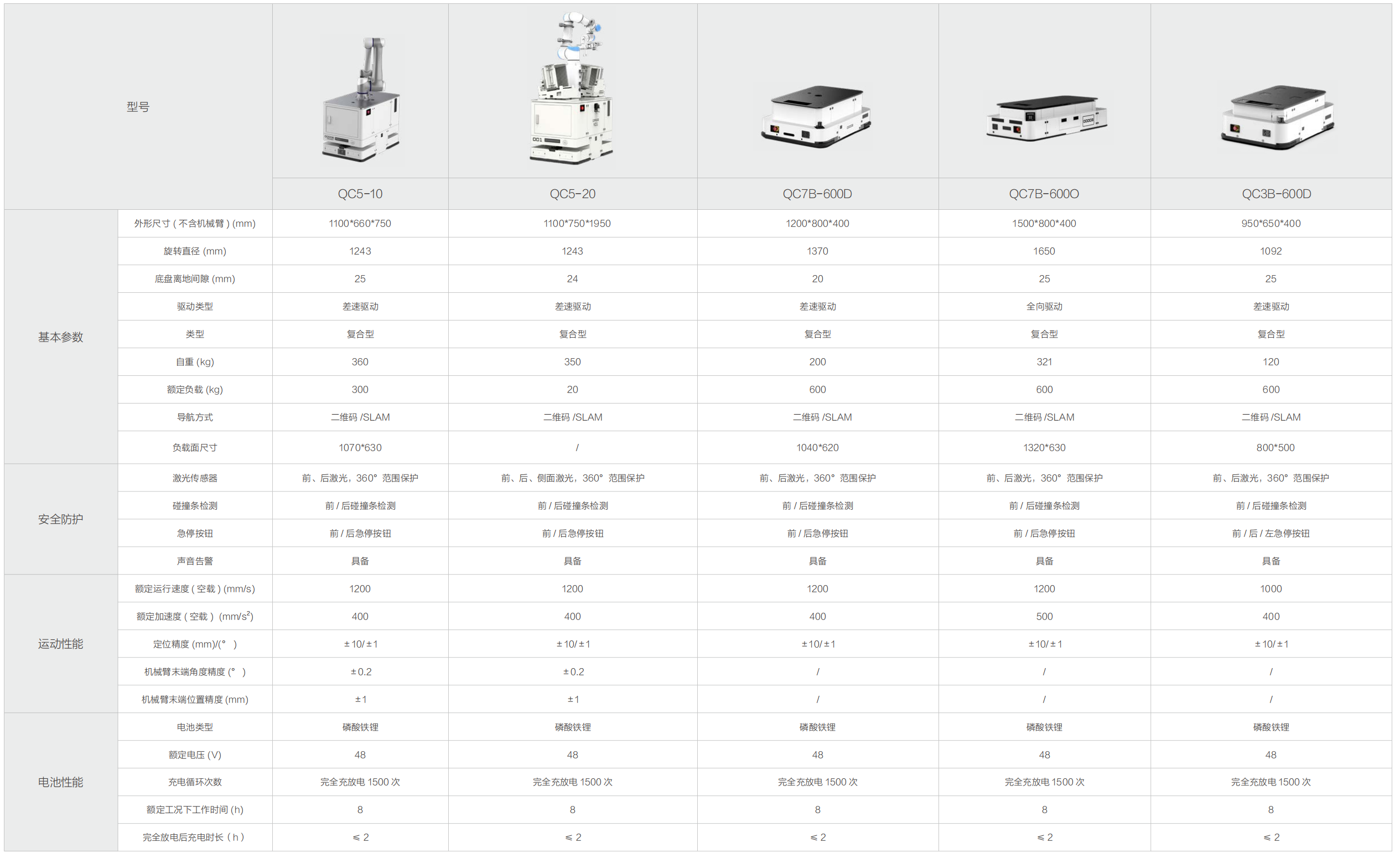
型号参数
人才招聘
示例文字:志同道合,同频共振,一起和优秀伙伴同行;
这里,是你理想的成长平台!









Copyright © 2025 四川流联科技有限公司 版权所有 蜀ICP备2024113372号-1
