Don't have an account yet? To register>
Password set successfully
Already have an account? Go to login>
Don't have an account yet? To register>

Applications of Mobile Robots in the Semiconductor Industry (Part 1)
The semiconductor industry, as a cornerstone of advanced manufacturing, imposes stringent requirements on yield, contamination control, and automation consistency.
With the widespread adoption of 300mm (12-inch) wafer fabs, Front Opening Unified Pods (FOUPs) typically exceed 10 kg in weight, making manual material handling infeasible under cleanroom and productivity constraints.
Overhead Hoist Transport (OHT) systems have become the primary intrabay transport solution in modern fabs. However, due to high CAPEX, rigid guideway layouts, and limited adaptability to layout changes, OHT systems alone cannot address all material handling scenarios.
As a result, ground-based mobile material handling systems are increasingly deployed as a complementary layer within the AMHS ecosystem, improving operational flexibility, system resilience, and overall fab automation coverage.
01 Overview of Mobile Robots in Semiconductor Fabs
Based on navigation methods, structural design, and intelligence levels, mobile robots commonly used in fabs can be categorized into four types:
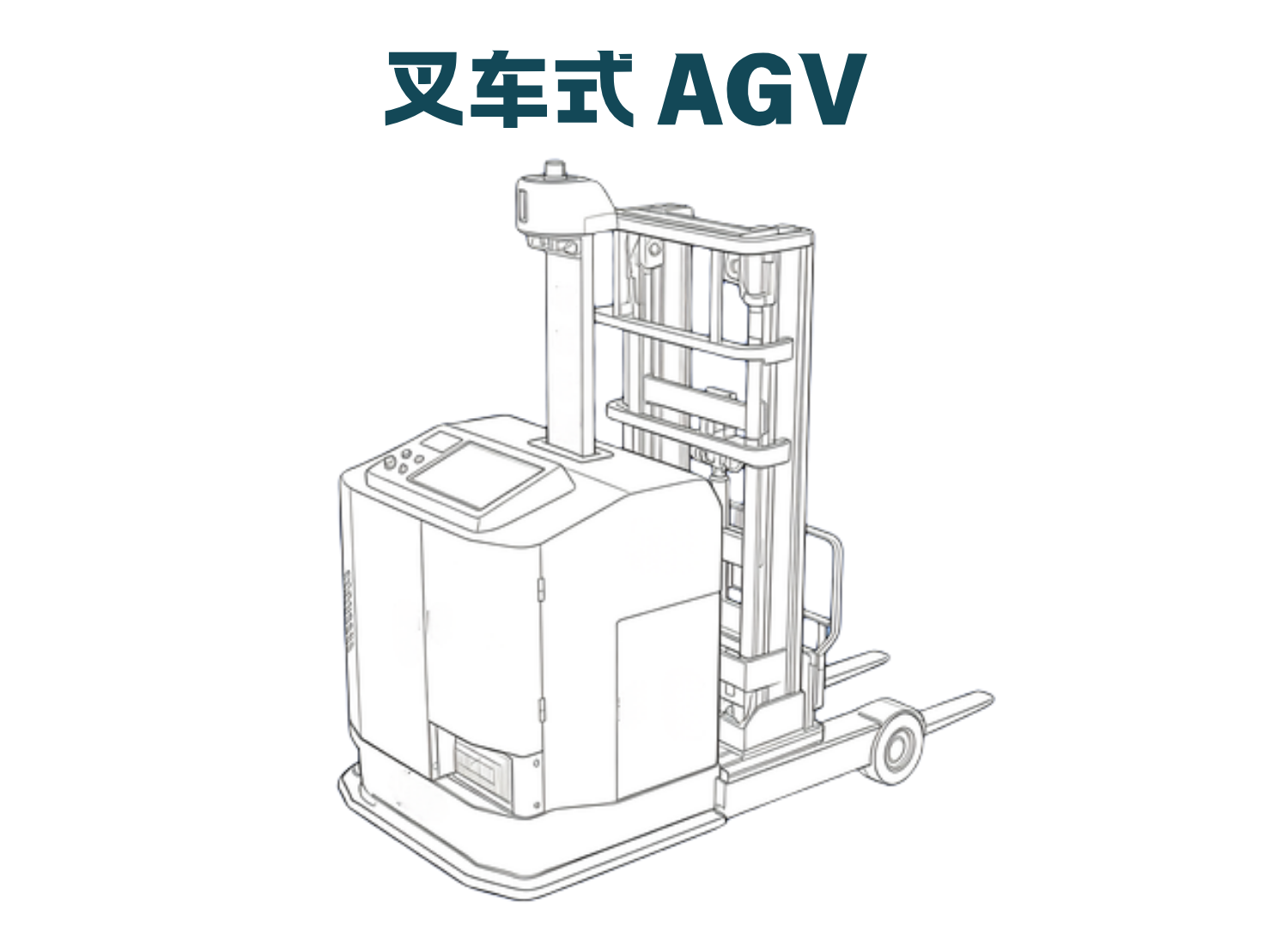
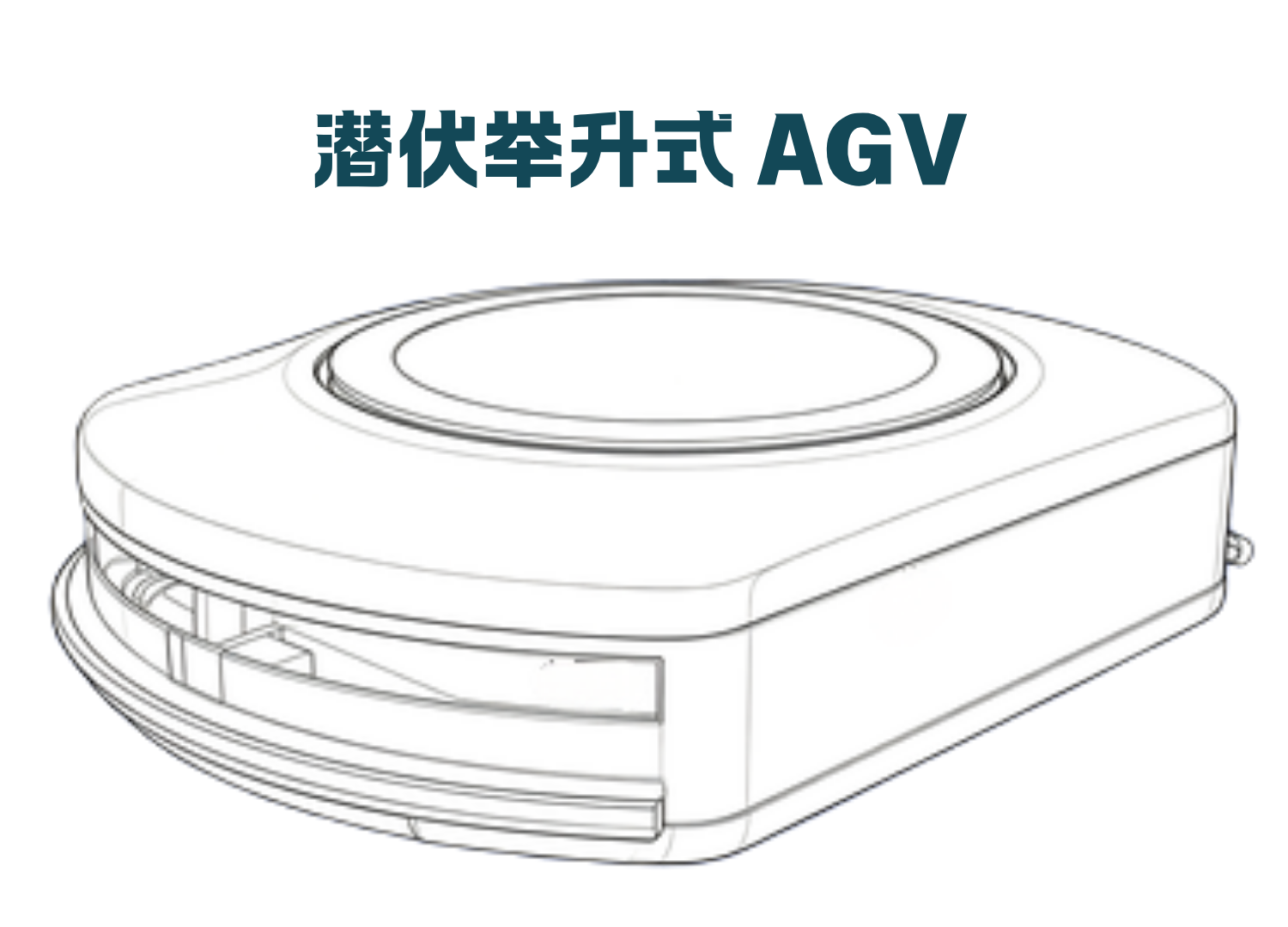
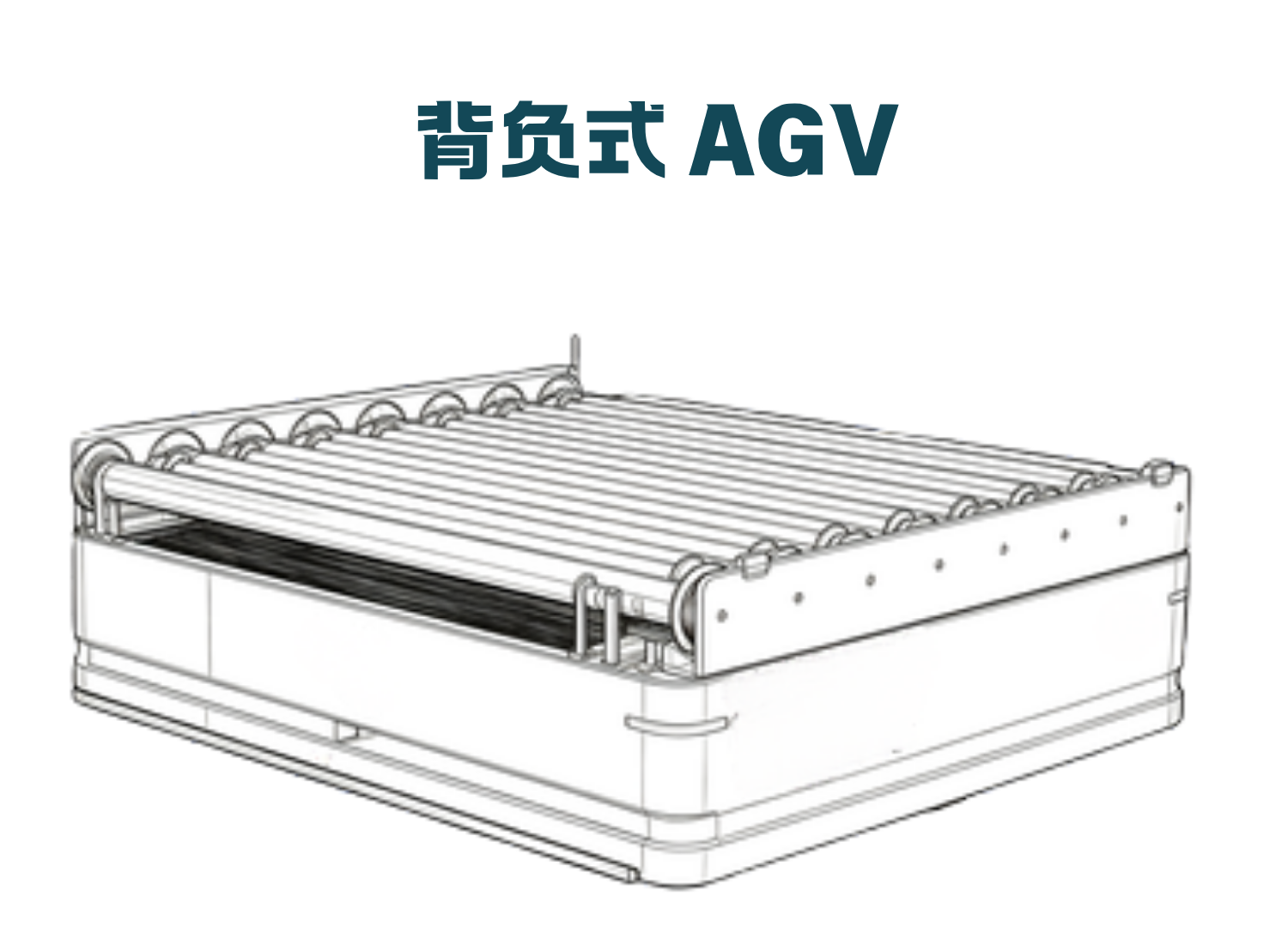
1. AGV (Automated Guided Vehicle)


Functional Positioning
AGVs have been widely adopted in the industry for many years. They are primarily responsible for point-to-point transportation of wafer carriers, reticle pods, and chemical containers, with positioning accuracy typically ranging from ±1 to ±5 mm.
Equipment Features
AGVs rely on external guidance infrastructure such as magnetic tapes, QR codes, magnetic nails, or laser reflectors to define their routes, resulting in fixed travel paths. They execute tasks based on predefined programs and can only stop or follow preset detours when encountering obstacles, lacking autonomous decision-making capabilities.
The chassis is typically made of stainless steel and equipped with high-efficiency air filtration systems and anti-static wheels, meeting ISO Class 1–4 cleanroom standards.
Advantages
- Mature technology with high operational stability
- Suitable for heavy-load material handling
- Simple scheduling architecture
- High safety in human-robot mixed environments, compliant with SEMI safety standards
Limitations
- Limited flexibility; production line changes require reinstallation of guidance infrastructure
- High modification cost and long implementation cycles
- Scalability constrained by the need for additional physical guidance systems
- Limited adaptability to unexpected obstacles or dynamic task adjustments
Applicable Scenarios
- Mature process production lines
- Fixed-process transport in packaging and testing facilities
- Material transfer between warehouses and cleanrooms
2. AMR (Autonomous Mobile Robot)
Functional Positioning
AMRs feature autonomous navigation, dynamic obstacle avoidance, and intelligent scheduling capabilities. They can handle wafer delivery, auxiliary material transport, and cross-floor logistics, with positioning accuracy reaching up to ±0.5 mm.
Equipment Features
AMRs utilize Simultaneous Localization and Mapping (SLAM) technology, integrating LiDAR, vision sensors, and inertial measurement units to perceive their surroundings. They can autonomously plan routes, avoid obstacles in real time, and support multi-robot collaboration.

They can also interface with Manufacturing Execution Systems (MES) and Equipment Automation Systems, enabling fully automated workflows for material request, delivery, and storage.
Advantages
- High flexibility; only digital map updates are required when production layouts change
- Rapid deployment; robots can be operational shortly after mapping
- Efficient multi-robot coordination in narrow spaces, improving space utilization
Limitations
- Higher hardware costs due to sensors and computing requirements
- Laser-based localization may suffer from inaccuracies in highly reflective cleanroom environments (e.g., stainless steel walls, glass enclosures), requiring sensor fusion (vision, UWB)
Applicable Scenarios
- Advanced process wafer fabs
- R&D and pilot production lines
- High-mix, low-volume manufacturing environments
3. Mobile Manipulator (Composite Mobile Robot)
Functional Positioning
A composite robot integrates a mobile base with a robotic arm, combining material transport and on-site operation capabilities. It can perform loading/unloading and stacking tasks while in motion, with robotic arm repeatability reaching ±0.5 mm.

Equipment Features
A dual-layer control architecture manages mobility and manipulation separately while ensuring coordinated operation. End effectors such as vacuum grippers or clamps can be swapped to handle different wafer carriers and inspection trays.
The robotic arm is equipped with torque sensing for precise force control, preventing damage to sensitive equipment.
Advantages
- Direct interfacing with production equipment for automated loading/unloading
- Reduces reliance on manual intervention
- Enables human-robot collaboration in semi-automated environments
Limitations
- Base positioning errors can propagate to the manipulation process, making calibration complex
- Mechanical operation may generate micro-particles and vibrations, requiring additional sealing and damping design
- Lower efficiency compared to fixed high-speed industrial robotic arms
Applicable Scenarios
- Semiconductor packaging and testing
- Wafer inspection processes
- Equipment loading/unloading
- Material handling in cleanroom environments
4. Humanoid Robots
Functional Positioning
Humanoid robots are currently in the stage of technical validation and small-scale pilot deployment, without large-scale industrial adoption. Featuring bionic structures and multi-joint motion, they are designed to perform fine manipulation tasks and replace certain manual operations.
Equipment Features
With a bipedal locomotion system and dual-arm configuration, humanoid robots can adapt to human-centric work environments. Powered by large AI models and embodied intelligence, they can execute tasks based on natural language instructions, reducing reliance on pre-programmed routines.
They integrate multimodal perception, including vision, touch, force, and auditory sensing, to simulate human decision-making processes.
Advantages
- Can be deployed without modifying existing factory infrastructure
- Capable of operating in human-designated workspaces
- Potential to become general-purpose operators with further technological advancements
Limitations
- Stability, endurance, and manipulation precision do not yet meet semiconductor manufacturing standards
- Joint motion, heat dissipation, and component wear may introduce contamination risks
- High cost and complex maintenance
- Safety concerns in dense industrial environments

Applicable Scenarios
- Laboratory testing
- Equipment maintenance assistance
- Inspection tasks in non-cleanroom areas
In the next part, we’ll dive deeper into application matching and selection criteria for mobile robots in semiconductor fabs—follow us to stay updated!



Talent Recruitment
Example text: Like minded, resonating with the same frequency, walking together with excellent partners;
This is your ideal growth platform!
Phone number:
+86-28-6394-4976
E-mail:
info@movelink.com
Address:
Room 101, Unit 3, Building 3, No.600 Shuxin Avenue, High-Tech District, Chengdu, China









Copyright © 2025 Sichuan Liulian Technology Co., Ltd. All rights reservedShu ICP No. 2024113372-1
