Don't have an account yet? To register>
Password set successfully
Automatically jump after 3seconds
Username
Phone number
Email
Verification Code
Please enter the verification code
Password
Enter password again
Already have an account? Go to login>
Don't have an account yet? To register>


IAR
IAR has integrated operational capabilities for movement, grasping and handling. It features high precision, high flexibility, high proliferation, easy operation and human-machine collaboration. It can support rapid integration and implementation in different application scenarios, simplify complex material handling scenarios and achieve more efficient industrial automation.
Category:
Share

Describe
Technical Highlights
High-performance
- High reliability: It can integrate with mainstream cobots arms in the market and ensure the stable operation of cobots arms with different loads and arm spans
- High precision: Combined with visual recognition, the precision of the cobot end effector execution can reach ±1mm and ±0.2 °
- Large operating space: The chassis can move flexibly, and in combination with the 6-axis freedom of the cobot arm, it can cover a large operating space and achieve intensive operation
High scalability
- Rich interface expansion: The chassis provides standard docking holes, electrical interfaces (power, communication, IO) and communication protocols (Modbus RTU/TCP, etc.) for upper-level mechanisms.
- Scenario scalability: Based on different designs of cobot arms, vision, and grippers, it can quickly match the application needs of different scenarios.
High flexibility
- Rich navigation options: 360° dual laser, SLAM navigation + inertial navigation, visual precise positioning (QR code assisted), compatible with texture navigation
- Flexible motion control: differential or omnidirectional drive, supporting forward, backward, turning, rotation and other motion control, which enables smooth and compliant motion process
- Multiple security protections: multi-sensors perception fusion, 360° security protection, support for flexible obstacle avoidance, etc.

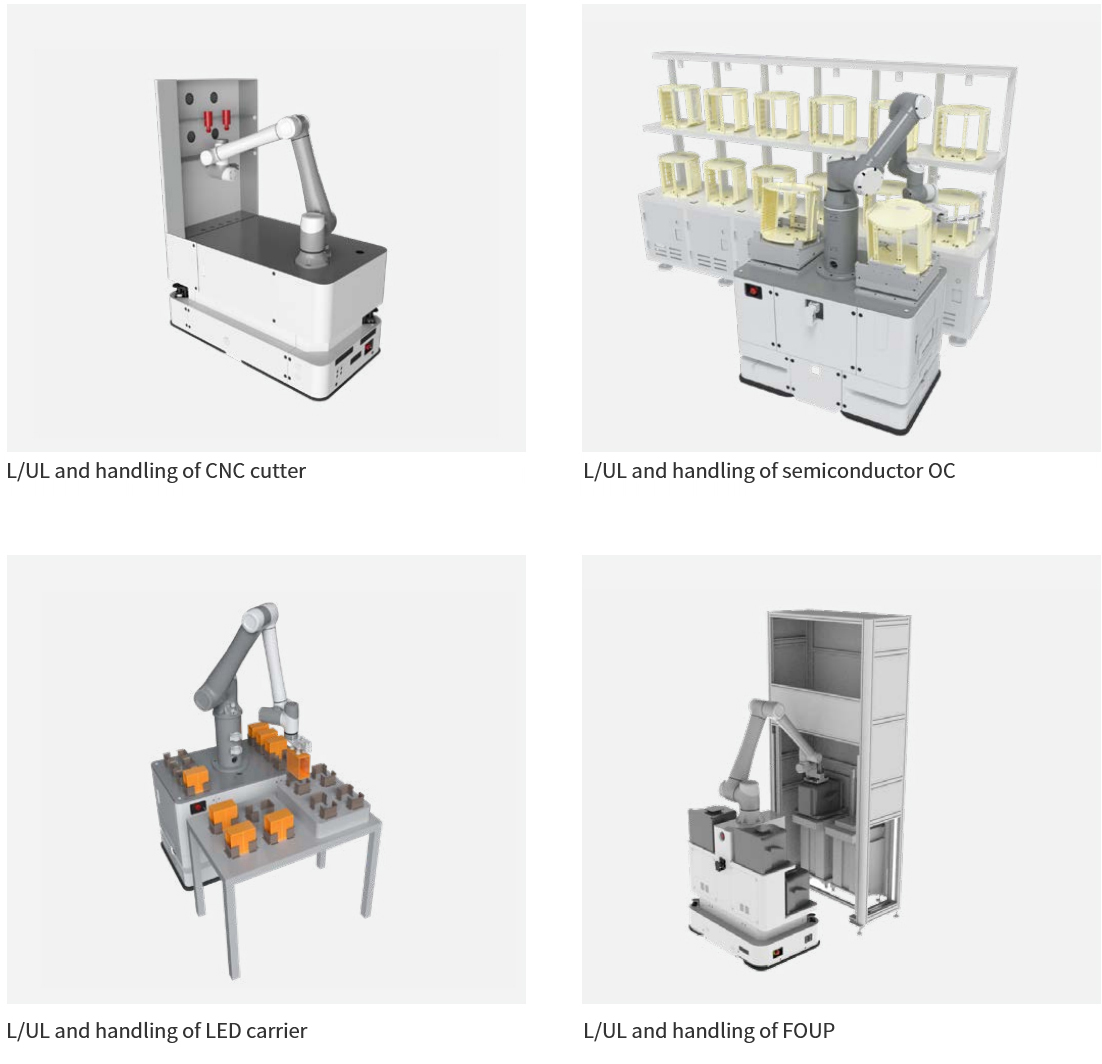
Application scenarios
Type
| Type |  |
 |
 |
 |
 |
|
| QC5-10 | QC5-20 | QC7B-600D | QC7B-6000 | QC3B-600D | ||
| Basic Parameter | Overall Dimensions(excluding robotic arm)(mm) | 1100*660*750 | 1100*750*1950 | 1200*800*400 | 1500*800*400 | 950*650*400 |
| Turning Diameter(mm) | 1243 | 1243 | 1370 | 1650 | 1092 | |
| Chassis Ground Clearance(mm) | 25 | 24 | 20 | 25 | 25 | |
| Drive Type | Differential Drive | Differential Drive | Differential Drive | Omnidirectional Drive | Differential Drive | |
| Type | Composite Type | Composite Type | Composite Type | Composite Type | Composite Type | |
| Self Weight(kg) | 360 | 350 | 200 | 321 | 120 | |
| Rated Load(kg) | 300 | 20 | 600 | 600 | 600 | |
| Navigation Method | QR Code/SLAM | QR Code/SLAM | QR Code/SLAM | QR Code/SLAM | QR Code/SLAM | |
| Load Surface Dimensions | 1070*630 | / | 1040*620 | 1320*630 | 800*500 | |
| Safety Protection | Laser Sensor | Front,Rear and Side Laser Sensors for 360° Area Protection |
Front,Rear and Side Laser Sensors for 360° Area Protection |
Front,Rear and Side Laser Sensors for 360° Area Protection |
Front,Rear and Side Laser Sensors for 360° Area Protection |
Front,Rear and Side Laser Sensors for 360° Area Protection |
| Collision Bar Detection | Front/Rear Collison Bar Testing | Front/Rear Collison Bar Testing | Front/Rear Collison Bar Testing | Front/Rear Collison Bar Testing | Front/Rear Collison Bar Testing | |
| Emergency Stop Button | Front/Rear Emergency Stop Button | Front/Rear Emergency Stop Button | Front/Rear Emergency Stop Button | Front/Rear Emergency Stop Button | Front/Rear Emergency Stop Button | |
| Audible Alarm | equiped | equiped | equiped | equiped | equiped | |
| Motion Performance | Rated Operating Speed(unload)(mm/s) | 1200 | 1200 | 1200 | 1200 | 1000 |
| Rated Acceleration(unload)(mm/s²) | 400 | 400 | 400 | 500 | 400 | |
| Positioning Accuracy(mm)/(°) | ±10/±1 | ±10/±1 | ±10/±1 | ±10/±1 | ±10/±1 | |
| End-Effector Angular Accuracy(°) | ±0.2 | ±0.2 | / | / | / | |
| End-Effector Position Accuracy(mm) | ±1 | ±1 | / | / | / | |
| Battery Performance | Battery Type | LFP | LFP | LFP | LFP | LFP |
| Rated Voltage(V) | 48 | 48 | 48 | 48 | 48 | |
| Charge Cycle Count | 1500 Full Discharge Cycles | 1500 Full Discharge Cycles | 1500 Full Discharge Cycles | 1500 Full Discharge Cycles | 1500 Full Discharge Cycles | |
| Operating Time Under Rated Conditions(h) | 8 | 8 | 8 | 8 | 8 | |
| Charging Time after Full Discharge(h) | ≤2 | ≤2 | ≤2 | ≤2 | ≤2 | |
Talent Recruitment
Example text: Like minded, resonating with the same frequency, walking together with excellent partners;
This is your ideal growth platform!
Phone number:
+86-28-6394-4976
E-mail:
info@movelink.com
Address:
Room 101, Unit 3, Building 3, No.600 Shuxin Avenue, High-Tech District, Chengdu, China









Copyright © 2025 Sichuan Liulian Technology Co., Ltd. All rights reservedShu ICP No. 2024113372-1
